Robots
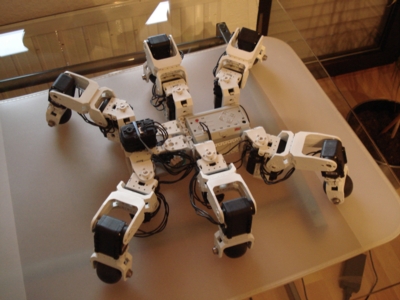
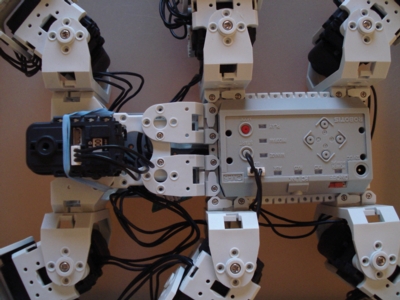
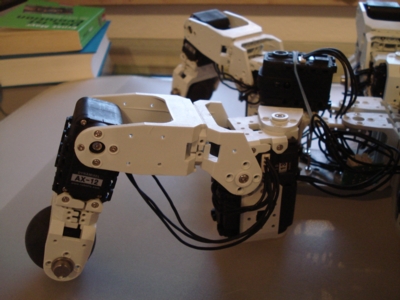
The program has to be configured manually in order to work with a specific robot. If you want to build a humanoid or hexapod robot, you can take a look at the robots below and use the predefined configuration files. If you want to make a custom robot, you should check the section: Configuration.Example: Custom Hexapod
The configuration file is: dh_hexapod.xml.

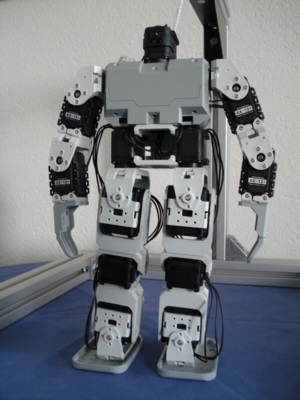
Example: Custom Humanoid
This is a customised version of the humanoid robot by robotis. The only difference is that the hip servos 7 and 8 have been inverted (see pictures below). The configuration file is: dh_humanoid.xml.